Động cơ xoay chiều có thể được chia thành hai loại chính - là Động cơ đồng bộ và Động cơ không đồng bộ. Một động cơ không đồng bộ được gọi phổ biến là động cơ cảm ứng. Cả hai loại khá khác nhau. Sự khác biệt chính giữa động cơ đồng bộ và động cơ cảm ứng được thảo luận dưới đây.
Chênh Lệch về động cơ
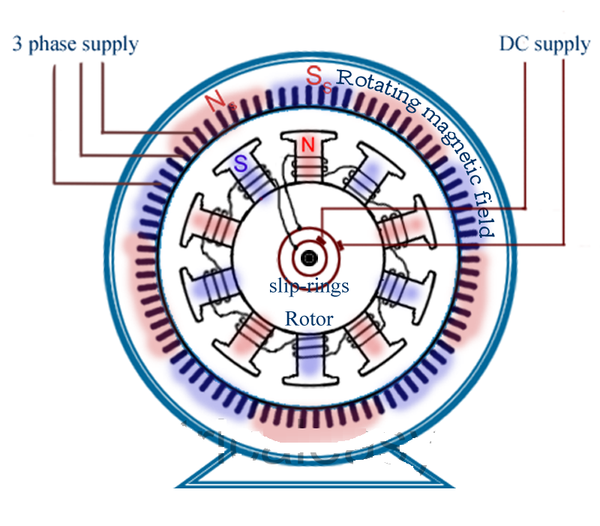
- Động cơ đồng bộ : Stator có các khe dọc trục bao gồm vết thương cuộn dây stato cho một số cực cụ thể. Nói chung, một Roto cực mạnh được sử dụng trên đó cuộn dây rôto được gắn. Cuộn dây rôto được cung cấp với nguồn cung cấp DC với sự trợ giúp của vòng trượt. Một cánh quạt với nam châm vĩnh cửu cũng có thể được sử dụng.
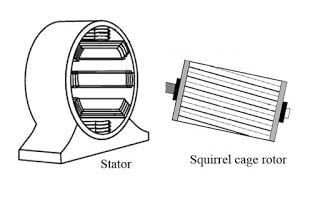
Động cơ đồng bộ - Động cơ cảm ứng : cuộn dây stato tương tự như động cơ đồng bộ. Đó là vết thương cho một số cực cụ thể. Một rôto lồng sóc hoặc một rôto vết thương có thể được sử dụng. Trong rôto lồng sóc, các thanh rôto được ngắn mạch vĩnh viễn với các vòng cuối. Trong rôto vết thương, cuộn dây cũng bị ngắn mạch vĩnh viễn, do đó không cần vòng trượt.
Động cơ cảm ứng
Sự Khác Biệt Trong Công Việc
- Động cơ đồng bộ : Các cực của stato quay với tốc độ đồng bộ (Ns) khi được cung cấp với nguồn cung cấp ba pha. Các cánh quạt được cung cấp với một nguồn cung cấp DC. Rôto cần được quay với tốc độ gần với tốc độ đồng bộ trong quá trình khởi động. Nếu được thực hiện như vậy, các cực của rôto được ghép từ tính với các cực của stato quay và do đó rôto bắt đầu quay với tốc độ đồng bộ.
- Động cơ đồng bộ luôn chạy ở tốc độ bằng tốc độ đồng bộ của nó.
tức là tốc độ thực tế = tốc độ đồng bộ
hoặc N = Ns = 120f / P - Động cơ cảm ứng : Khi stato được cung cấp với nguồn cung cấp AC hai pha hoặc ba pha, từ trường quay (RMF) được tạo ra. Tốc độ tương đối giữa từ trường quay của stato và rôto sẽ gây ra dòng điện cảm ứng trong các dây dẫn của rôto. Dòng điện rôto làm tăng thông lượng rôto. Theo định luật của Lenz, hướng của dòng điện cảm ứng này là nó sẽ có xu hướng chống lại nguyên nhân sản xuất của nó, tức là tốc độ tương đối giữa RMF của stator và rôto. Do đó, rôto sẽ cố gắng bắt kịp với RMF và giảm tốc độ tương đối.
- Động cơ cảm ứng luôn chạy ở tốc độ nhỏ hơn tốc độ đồng bộ.
tức là N <Ns
Sự Khác Biệt Khác
- Động cơ đồng bộ đòi hỏi một nguồn điện DC bổ sung để cung cấp năng lượng cho cuộn dây rôto. Động cơ cảm ứng không yêu cầu bất kỳ nguồn năng lượng bổ sung.
- Vòng trượt và bàn chải được yêu cầu trong động cơ đồng bộ, nhưng không phải trong động cơ cảm ứng (ngoại trừ động cơ cảm ứng loại vết thương trong đó động cơ vòng trượt được sử dụng để thêm điện trở bên ngoài cho cuộn dây rôto).
- Động cơ đồng bộ yêu cầu cơ chế khởi động bổ sung để ban đầu quay rôto gần với tốc độ đồng bộ. Không có cơ chế khởi động được yêu cầu trong động cơ cảm ứng.
- Hệ số công suất của động cơ đồng bộ có thể được điều chỉnh thành độ trễ, thống nhất hoặc dẫn đầu bằng cách thay đổi kích thích, trong khi đó, động cơ cảm ứng luôn chạy ở hệ số công suất trễ.
- Động cơ đồng bộ thường hiệu quả hơn động cơ cảm ứng.
- Động cơ đồng bộ là đắt tiền hơn.
